





Optical ranging and imaging is one of the core technologies in modern intelligent sensing, precision measurement, and three-dimensional information acquisition. By using the interaction between light and target objects, it can simultaneously obtain information such as target range, velocity, spatial position, reflectivity, and three-dimensional structure, thereby enabling high-precision digital reconstruction of the physical world.
With the rapid development of autonomous driving, robotics, unmanned systems, smart manufacturing, augmented reality, the low-altitude economy, remote sensing, mapping, and scientific instrumentation, optical ranging and imaging is becoming an important interface between the physical and digital worlds. Future intelligent systems need to know not only “where” a target is, but also “how far away” it is, “how fast” it is moving, “what its three-dimensional morphology is,” and “how it evolves over time.” These demands are driving optical ranging and imaging technologies toward higher precision, faster speed, larger field of view, longer detection range, and stronger environmental adaptability.
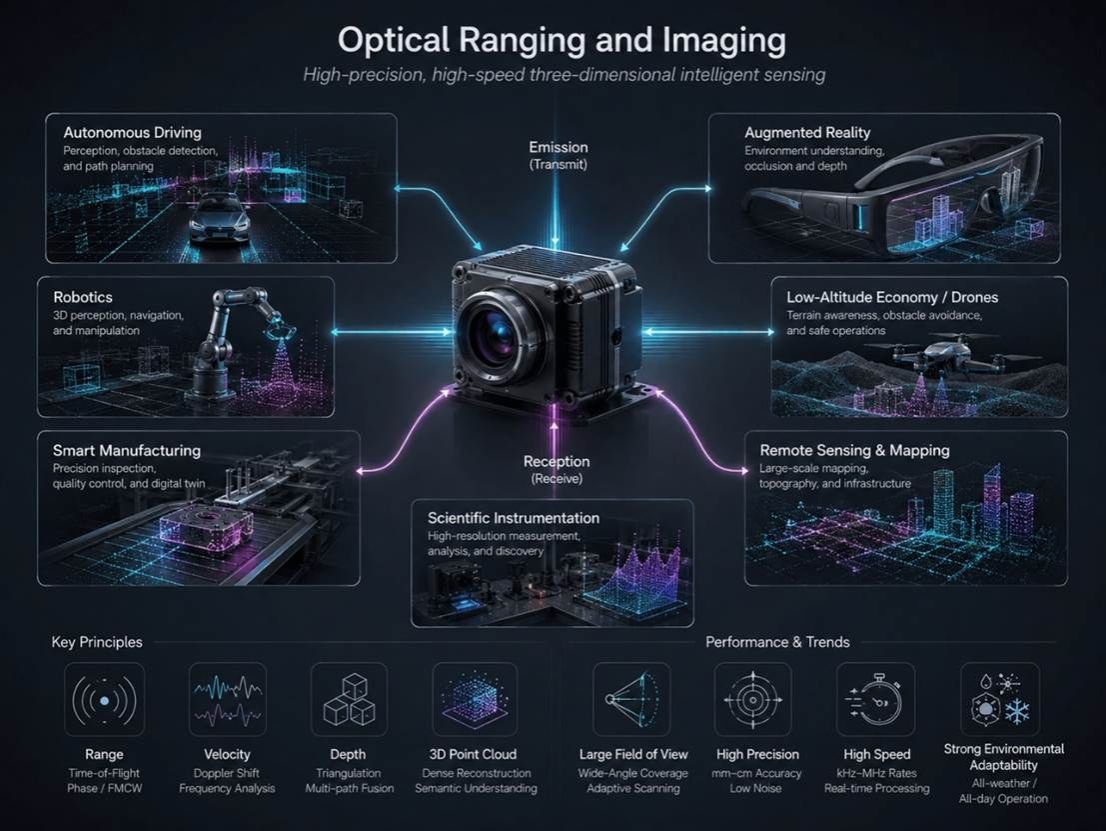
Optical waves have intrinsic advantages such as short wavelength, high carrier frequency, and large available bandwidth, making them particularly suitable for high-resolution spatial measurement. By measuring the time, phase, frequency, and intensity information carried by light as it propagates from the system, illuminates the target, and returns to the detector, the spatial depth and three-dimensional structure of the target can be recovered. Common technical approaches include time-of-flight methods, structured light, triangulation, phase-based ranging, coherent detection, and frequency-modulated continuous-wave LiDAR. Although these methods differ in implementation, their shared goal is to convert the physical information carried by the optical field into three-dimensional spatial information of the target.
In modern optical ranging and imaging, LiDAR is one of the most representative systems. By actively emitting laser light and receiving the signal returned from the target, LiDAR can generate depth maps or three-dimensional point clouds of a scene. Conventional time-of-flight LiDAR obtains range information by measuring the round-trip propagation time of optical pulses and is suitable for large-range three-dimensional detection. Structured-light and triangulation methods are suitable for short-range, high-precision three-dimensional surface reconstruction. Coherent LiDAR and frequency-modulated continuous-wave LiDAR use the phase and frequency information of the optical field, enabling higher sensitivity, higher ranging precision, and velocity-resolved measurement. In particular, FMCW LiDAR can simultaneously extract range and velocity information from the beat signal. Because it uses coherent detection, it can effectively suppress ambient-light interference, making it highly promising for autonomous driving, robotic navigation, three-dimensional mapping, and industrial inspection.
From a system-level perspective, the key challenge of optical ranging and imaging is no longer simply whether range can be measured, but how high-speed, high-precision, and large-scale three-dimensional information can be acquired in complex dynamic scenes. A high-performance ranging and imaging system must satisfy multiple requirements at the same time: sufficiently high ranging precision, a sufficiently fast point-cloud sampling rate, a sufficiently large field of view, strong interference immunity, and miniaturized, low-power operation suitable for practical applications. However, conventional optical ranging and imaging systems are usually composed of discrete lasers, modulators, fiber components, amplifiers, scanning elements, detectors, and complex electronic systems. These systems often suffer from large size, high cost, limited stability, and difficulty in scalable integration.
Therefore, optical ranging and imaging is evolving toward parallelization, chip-scale integration, coherence, and intelligence. Parallelization means that the system no longer relies on a single beam to scan point by point, but instead acquires spatial information simultaneously through multiple wavelengths, multiple channels, multiple pixels, or multiple beams, thereby significantly improving imaging speed and point-cloud generation efficiency. Chip-scale integration means integrating functions such as light-source control, modulation, beam splitting, filtering, delay, coherent reception, and signal processing onto a photonic chip, improving system stability while reducing size and power consumption. Coherence means using the phase and frequency information of the optical field to achieve higher measurement precision and velocity resolution. Intelligence means combining ranging and imaging systems with computational imaging, machine learning, and real-time decision-making algorithms to form a complete chain from data acquisition to scene understanding.
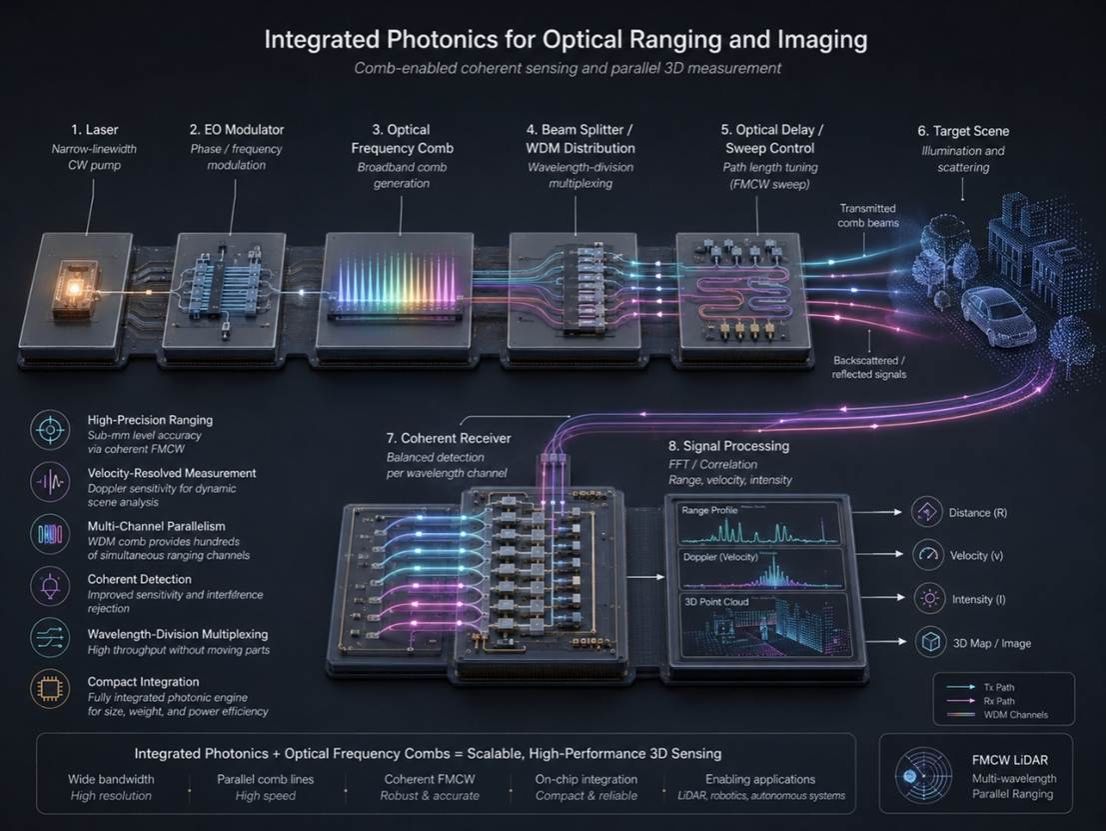
Optical frequency combs provide an important technological foundation for high-performance optical ranging and imaging. An optical frequency comb consists of a large number of equally spaced and mutually coherent optical frequency components, and can be regarded as a precise “optical frequency ruler.” In ranging and imaging systems, optical frequency combs can provide not only accurate frequency references, but also multi-wavelength parallel carriers, allowing different comb lines to serve as different detection channels. Through wavelength-division multiplexing, multiple channels can measure the target simultaneously, significantly improving the sampling rate of three-dimensional point clouds and the imaging speed. When combined with FMCW techniques, optical frequency combs can also support multi-channel coherent ranging and imaging, enabling high precision, high speed, and velocity resolution simultaneously.
Integrated photonics further provides a new hardware foundation for optical ranging and imaging systems. Although conventional discrete optical systems can offer excellent performance, they often struggle to meet the requirements of future intelligent sensing systems for miniaturization, stability, low power consumption, and scalable manufacturing. Integrated photonic chips can compress complex optical functions into micro- and nanoscale platforms, enabling on-chip modulation, frequency-comb generation, beam distribution, filtering, delay, and coherent detection. By combining these functions with electronic control, detector arrays, and algorithmic processing, future optical ranging and imaging systems may evolve from large laboratory systems into compact, stable, and deployable intelligent sensing modules.
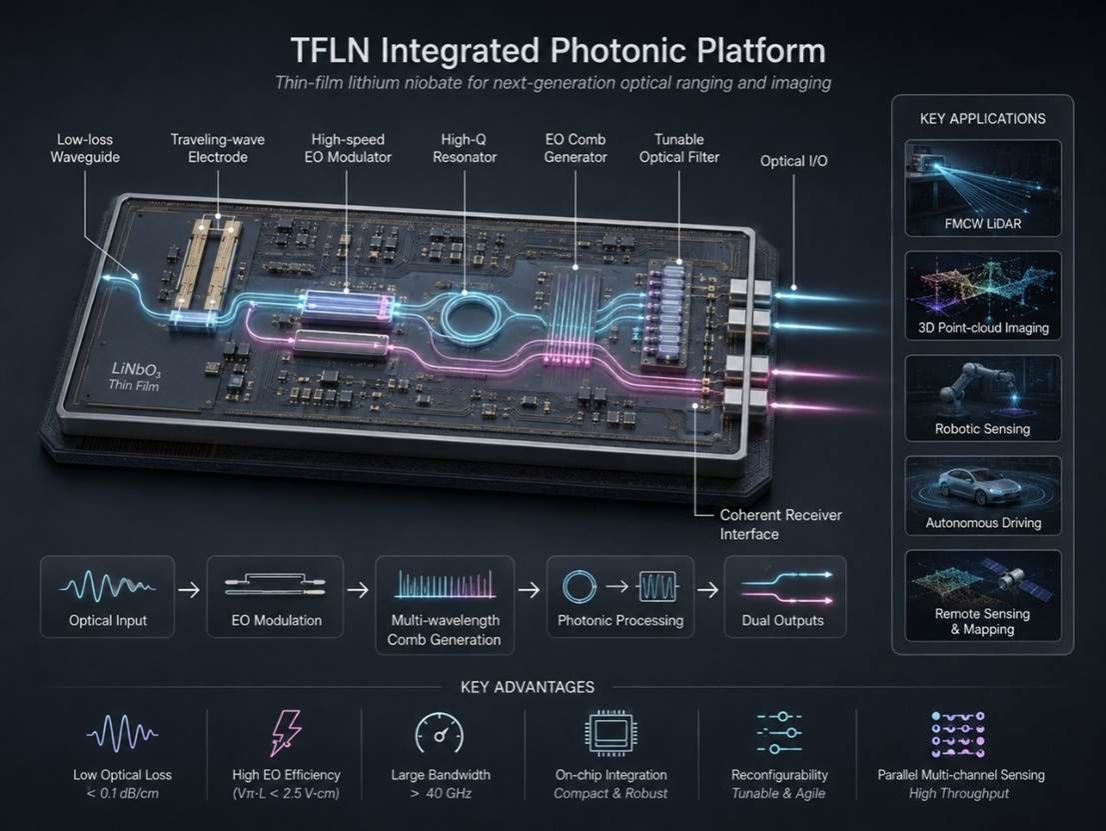
Thin-film lithium niobate, or TFLN, provides a highly promising integrated photonic platform for next-generation optical ranging and imaging. Lithium niobate has a strong electro-optic effect, excellent second-order nonlinearity, a broad transparency window, and good optical stability, enabling efficient mutual control between microwave electrical signals and optical fields. The thin-film lithium niobate platform further combines the strong optical confinement of nanophotonic structures with the high-speed electro-optic response of conventional lithium niobate, making high-speed, broadband, low-loss, and high-efficiency on-chip optical control possible.
In optical ranging and imaging, the high-speed electro-optic modulation capability of TFLN is particularly important. FMCW LiDAR requires stable, linear, and broadband optical frequency control, and electro-optic modulation provides an important route toward high-speed, controllable, and integrable frequency sweeping. TFLN-based high-speed modulators, electro-optic resonators, and electro-optic frequency combs can generate broadband, coherent, and programmable optical signals, providing the core light-source and modulation basis for high-precision range–velocity measurement and three-dimensional point-cloud generation. At the same time, TFLN chips can also support on-chip beam splitting, delay, filtering, coherent reception, and multi-channel signal processing, offering a path toward compact and highly stable on-chip LiDAR and three-dimensional imaging systems.
TFLN optical frequency combs and integrated photonic networks also provide important support for parallel ranging and imaging. Different wavelength channels can serve as independent detection channels, participating in target measurement simultaneously or corresponding to different spatial scanning paths, thereby improving point-cloud generation rate and three-dimensional imaging efficiency. Through wavelength-division multiplexing, coherent detection, and high-speed electro-optic control, the TFLN platform is expected to enable optical ranging and imaging systems with high channel count, high precision, and high frame rate. Furthermore, by combining on-chip optical switches, tunable filters, modulator arrays, and beam-control structures, TFLN can also support reconfigurable imaging, dynamic scene perception, and highly reliable measurement in complex environments.
Overall, optical ranging and imaging is evolving from conventional two-dimensional observation and single-point ranging toward high-speed, parallel, coherent, chip-scale, and intelligent sensing technologies for three-dimensional spatial information acquisition. Higher ranging precision, faster imaging speed, larger detection range, and stronger environmental adaptability impose new requirements on underlying photonic devices and system architectures. With its strong electro-optic effect, low-loss nanophotonic structures, high-speed modulation capability, and potential for on-chip integration, thin-film lithium niobate provides an important technology platform for next-generation optical ranging and imaging systems. TFLN-based integrated photonic technologies are expected to play an important role in FMCW LiDAR, optical frequency-comb ranging and imaging, three-dimensional point-cloud generation, robotic sensing, autonomous driving, smart manufacturing, remote sensing and mapping, and scientific measurement.